Energy Resource
力之源科技

PRODUCTS
產(chǎn)品中心





動(dòng)態(tài)復(fù)雜環(huán)境定位導(dǎo)航
核心算法模組化方法
設(shè)計(jì)敏捷化
高能效硬件加速
及信息安全技術(shù)
片上系統(tǒng)設(shè)計(jì)方法
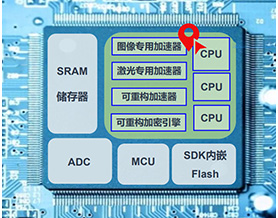
硬件加速化
未知環(huán)境
高效感知與地圖構(gòu)建
核心算法模組化方法
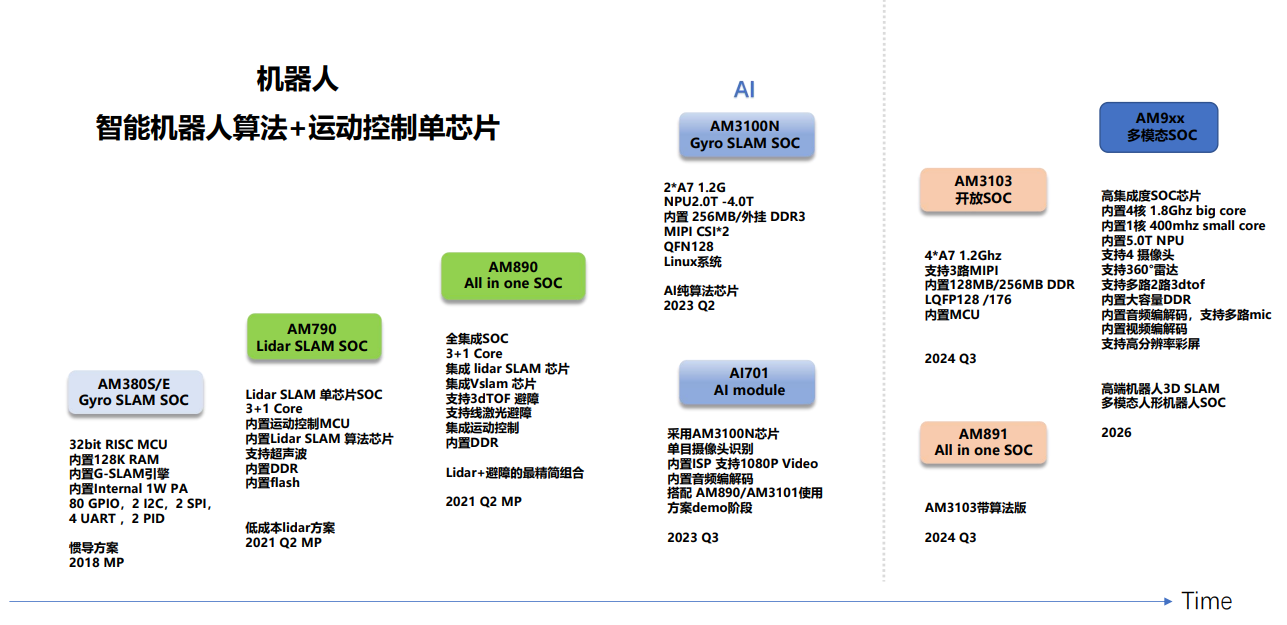
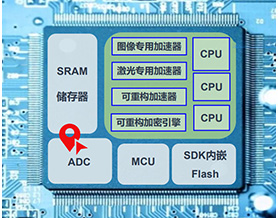
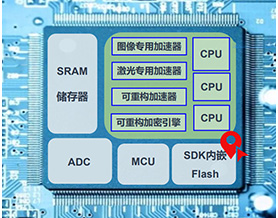
算法芯片化
低功耗高算力
異構(gòu)多核高集成
片上系統(tǒng)設(shè)計(jì)方法
芯片多核化
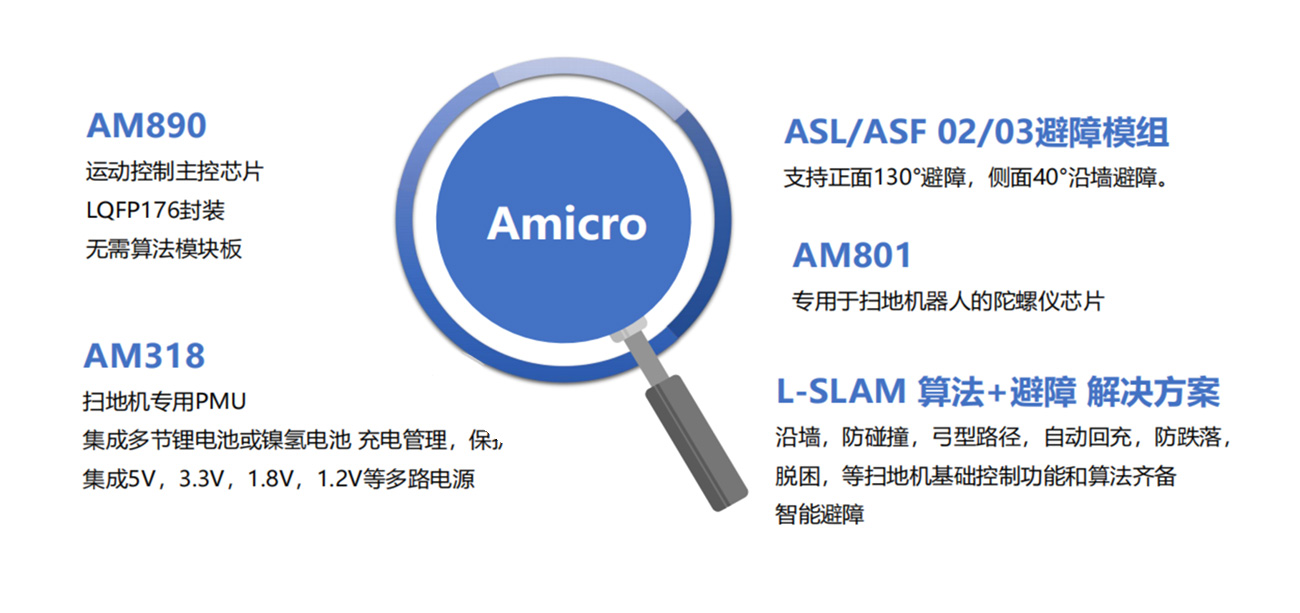


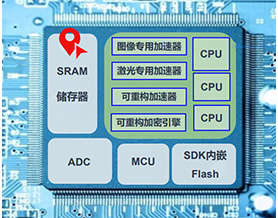
產(chǎn)品系列
芯片應(yīng)用方案
數(shù)據(jù)加密方案
定制化方案
友情鏈接
公司地址:廣東省深圳市福田車公廟泰然六路雪松大廈B座 3B
熱線:0755- 83432776
郵箱:david.zhao@er-tech.cn
- 無(wú)數(shù)據(jù)
力之源科技
版權(quán)所有:深圳力之源科技有限公司
聯(lián)系方式
Energy Resource